
Denizaltıların pervanelerin niçin orak şeklinde ve genelde yedi kanatlı olduğunu merak ettiniz mi? Sovyetlerin denizaltıları için sonara yakalanmayan pervaneler geliştirmelerine imkan verdiği için büyük bir krize dönüşen Toshiba-Kongsberg Skandalı’nı duymuş muydunuz? Kendi denizaltı tasarımını geliştiren ülkelerinbu denizaltılarla ilgili hesaplamalı ve deneysel çalışmalar yaptığını biliyoruz. Bu çalışmaların ülkemizde geliştirilen Milden başta olmak üzere Datum Çok Amaçlı Mini Denizaltı Projesi, STM500 ve Dearsan denizaltı projeleri için de ciddi bir ihtiyaç olduğu görülmüş ve bu amaçla insansız denizaltılar geliştirilmeye başlanmış bulunuyor.
Aslında denizaltı pervaneleri ile ilgili bir yazı yazmak üzere bilgisayarın başına oturmuştum. Ancak dile kolay 2008 yılından başlayarak 16 yıldır yapmakta olduğumuz araştırmaları anlatmaya çalışırken kelimenin tam manasıyla laf lafı açtı. Yazıyı yarın okusam, büyük ihtimalle yeni bilgiler öğrenmiş ve bazı yerlerini içime sindiremez olacağım, o yüzden de koy verdim döktüm eteğimdeki taşları. Denizaltı pervaneleri ve denizaltı hidrodinamiği çalışmaları ile ilgili bu kadar farklı kaynaktan derlenmiş bilgiyi derli toplu tek bir makale içinde bir yerde rastlamamıştım. Yazının amacı başta denizaltılara meraklı olan ve ülkesi için başarmak amacıyla yanıp tutuşan öğrencilerime araştırmalarına başladıklarında bir volan etkisi yaratarak onları hızlandıracak bir yazı ortaya koymaktı. Sonrasında denizaltı tasarım mühendislerimize bu 16 yıllık çalışma ile damıttığım bilgi birikimimi biraz olsun aktarabilmek ve tabi Türk Denizaltı Filosu’nun kıymetli personeline ilginç bulacaklarını umduğum bir yazı armağan edebilmekti. Yazıda öncelikle denizaltı pervaneleri ile ilgili bilgiler paylaşılacak ve yanlış bilinen bazı bilgiler düzeltilecek, bunun ardından da daha genel anlamıyla denizaltı hidrodinamiği çalışmaları ele alınacaktır. İlerleyen kısımlarda ise Dünya’daki denizaltı hidrodinamiği çalışmaları incelenecek, Türkiye’de yapılan çalışmalar mercek altına alınacak ve nihayetinde Milden başta olmak üzere Çok Amaçlı Mini Denizaltı Projesi, STM500 ve Dearsan denizaltı projeleri ile ilgili öneriler sıralanacaktır. Ülkemizde insansız denizaltı geliştirilmesine yönelik bazı ön çalışmalar ve teknolojik yeterlilik seviyesi de yine ele alınacaktır.
Konuya Denizaltı Pervaneleri ile başlayalım;
Bazı denizaltı pervanelerinin 5, bazılarının 6, çoğunun 7 ve hatta bazılarının 8 kanatlı olduğuna dikkat ettiniz mi?
Peki ya pervanenin göbeğindeki bitiş parçasının (boss cap) farklı geometrilere sahip olabildiği dikkatinizi çekti mi?
- Soru-1: Pervane kanat sayısı neye göre belirleniyor?
- Soru-2: Pervane göbek parçası için niçin denizaltılarda ilginç geometriler kullanılıyor?
- Soru-3: Denizaltıyı özellikle de pervaneyi sessizleştirmekle ilgili mühendislik çalışmaları nasıl yürütülüyor?
Öncelikle farklı tonajlarda, farklı hızlarda ve farklı sevk sistemlerine sahip denizaltıların pervane tasarımlarına bir göz atalım;

48000 Ton Deplasmana Sahip Rus Typhoon Sınıfı Denizaltının 7 Kanatlı ve Nozullu Pervanesi
- Akula sınıfı Rus nükleer denizaltıları 8500 ton deplasmana sahip ve 7 kanatlı pervaneleri var 35knot sürat yapıyorlar,
- Victor III sınıfı Rus denizaltıları 7500 ton deplasmana sahip ve bazılarında 5 bazısında 8 kanatlı (tandem) pervane var ve onlar da 30 knot üzerinde sürat yapabiliyor.
- Typhoon sınıfı denizaltı 48000 ton deplasmana sahip ve 27 knot sürat yapabiliyor ve iki adet 7 kanatlı pervaneye sahip.

500 Ton Deplasmana Sahip Type 206 Denizaltısının 7 Kanatlı Pervanesi
- Ay sınıfı denizaltı 1285ton deplasmana sahip, 22 knot sürat yapabiliyor ve 5 kanatlı pervaneye sahip.
- Type 205 denizaltısı da 500 ton deplasmana sahip 17 knot yapabiliyor ve 5 kanatlı pervaneye sahip.
- Alman Type 206 denizaltısı 500 ton deplasmana sahip 20 knot yapabiliyor ve 7 kanatlı pervaneye sahip.
- Type 212 denizaltısı 1800ton deplasmana sahip 20 knot sürat yapıyor ve 7 kanatlı pervaneye sahip.

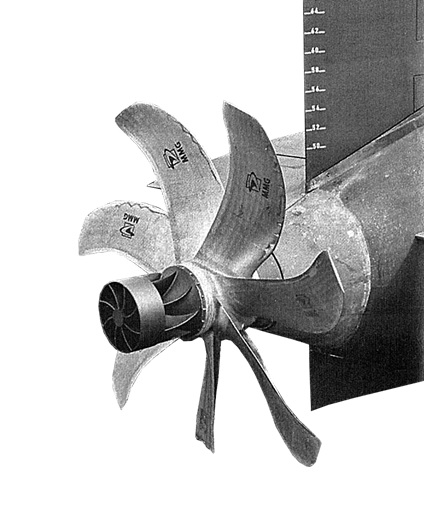
Victor III Sınıfı Rus Denizaltısına Ait 8 Kanatlı Tandem Pervane
- Walrus sınıfı 2800 ton deplasmana sahip, 21 knot yapıyor ve beş kanatlı pervaneye sahip,
- Advanced Swimmer Delivery System denizaltısı 60 ton deplasmana sahip, 8 knot yapabiliyor ve 6 kanatlı pervaneye sahip.
Bu denizaltıların boyutlarına, hızlarına ve kanat sayılarına baktığımız zaman küçük denizaltılar az kanatlı büyük denizaltılar çok kanatlı diyemiyoruz. Sürati düşük ve boyutu ufak olduğu halde fazla kanat sayısına sahip olan denizaltılar olduğu gibi büyük olduğu halde az kanat sayısına sahip olan denizaltılar da var. Hız aşırı artmadıkça (35/40 knot gibi hıza sahip olan Alfa veya Papa sınıfı denizaltılarda olduğu gibi) hızlı olan daha çok kanat sayısına sahip veya büyük olan fazla kanat sayısına sahip diye de denizaltıları ayırt edemiyoruz. Demek ki denizaltının pervanesinin kanat şekli veya sayısı denizaltının hızı veya deplasmanına orantılanabilecek bir faktör değil. Başka bir nedeni olmalı..

Alman Type 212A Denizaltısı 6 kanatlı Pervane İle
Savaş gemilerinde ise akustik ve titreşim kaygısı yakıt tüketiminin önüne geçiyor. Gemilerde pervane gürültüsü tüm diğer gürültü kaynaklarını bastırıyor çünkü en düşük frekans ve en yüksek seviyedeki gürültüyü pervane harmonikleri, bilhassa da ilk harmonikte görüyoruz. Bu tonalın düşük frekansta olması büyük bir dalga boyuna sahip olmasına ve dolayısıyla çok uzak mesafeye yayılabilmesine neden oluyor. Bu da savaş gemisinin (bizim ilgi odağımızda: denizaltının) düşman gemilerince pasif sonarlar ile fark edilmesi ile sonuçlanıyor.

Bluewhale İnsansız Sualtı Aracı

İngiliz Autosub İnsansız Sualtı Aracı
Konu aslında verimli seyir ile sessiz seyirin çatışmasında yatıyor. Gemiyi sevk edecek en verimli pervanenin uygun hatveye (pitch) sahip, en az sayıda kanata sahip, mümkün olduğunca büyük çaplı ve düşük devirde dönen bir pervane olduğunu söyleyebiliriz. Dizayn amacı çok uzun bir sıaya (menzile) ulaşmak olan insansız sualtı araçlarında (Autosub gibi, Bluewhale gibi) iki kanatlı büyük çaplı ve yüksek verimli pervaneler görüyoruz. Bir tanker gibi, konteyner gemisi gibi ticari bir gemide armatör mümkün olduğunca az yakıt sarf etmek istediği için mümkün olduğunca büyük çaplı ve genelde 3/4 kanatlı pervaneler kullanılıyor.

Pervane Gürültü Harmonikleri
Pervane gürültüsü harmoniklerini
BRF (Blade Rate Frequency) = n*bir saniyedeki pervane deviri*pervane kanat sayısı
formülü ile hesaplıyoruz. Sessiz pervane yapabilmekte iki önemli husus var;
1- BRF’i mümkün olduğunca yüksek frekanslara ötelemeye çalışmak,
2- Harmoniklerdeki peakleri mümkün olduğunca törpülemek,
BRF’i mümkün olduğunca yüksek frekanslara ötelemeye çalışıyoruz. Bu da verimli pervanede aradığımız düşük devir, büyük çap ve az kanat sayısı isterlerimizle tamamen zıt düşüyor. BRF’i yüksek frekanslara taşıyabilmek için hızlı dönen, çok kanatlı ve dolayısıyla da küçük bir pervaneye ihtiyacımız var. Hızlı dönen pervane de bir yandan kavitasyon riski doğuruyor. Ama kavitasyon bizim için ikincil derecede önemli bir husus çünkü derinlikle artan basınç kavitasyon yapmamıza engel oluyor ve satıha yakın snorkel veya periskop seyrinde de zaten nispeten düşük süratlerde ve düşük pervane devirlerinde seyir yapıyoruz. Yine de kavitasyondan mümkün olduğunca kaçınacak şekilde cavitation bucket diagramlarını hesaba katılarak kanat kesitlerine karar vermek gerekiyor. Ancak pervane çapı çok küçüldüğünde de pervane tamamen gövdenin izi arkasında kalmak, aşırı yüklenmek durumunda kalıyor ki bu da yine gürültüye olumsuz etki yarattığından pek tercih edilen birşey değil. Burcher ve Rydill “Concepts in Submarine Design” isimli kitaplarında pervane çaplarını 0.4 ila 0.7 denizaltı çapı ile sınırlandırmıştırlar. 0.4D çapında olan pervanelerde thrust deduction ve wake fraction katsayılarının çok yükseldiği raporlanmıştır. Bu bilgiler ışığında kah verimden kah akustikten trade of yaparakygun bir çapı seçmek gerekiyor.
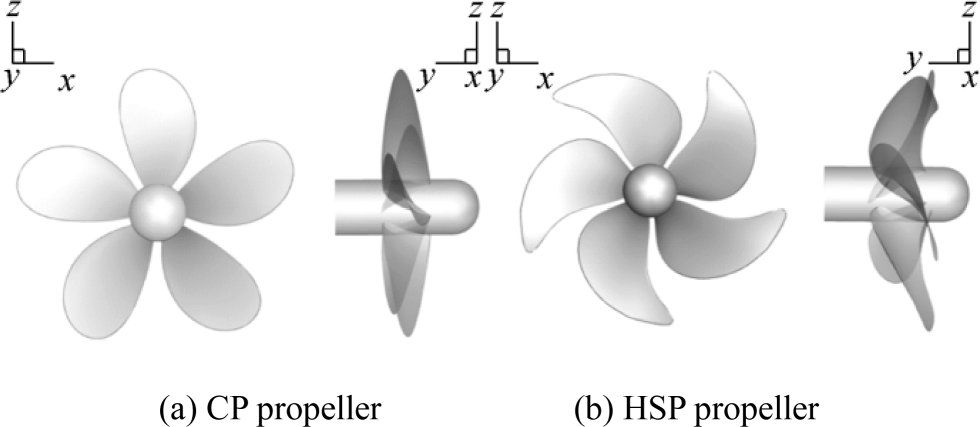
(sol) Konvansiyonel Pervane ve (sağ) Yüksek Çalıklığa (Skewlü) Pervane
Denizaltı pervanesinin gürültüsünü azaltmak için izlememiz gereken ikinci ama daha az önemli olmayan uygulama ise harmoniklerdeki tonalların peaklerini mümkün olduğunca törpülemek. Bu da artan kanat sayısı ile daha geniş bir yüzeyle akışı karşılayarak, daha geniş blade are ratio ile, skew (skew kanadın izin içinde tamamen kaybolmamasını sağladığı için titreşime ve akustiğe olumlu etki yapıyor) ile, ize uyumlu kanat hatce dağımı ile, tip unloading ile ve propeller boss capler ile yapılmaya çalışılıyor.

Tip Unloadinge Sahip Olmayan Denizaltı Pervanesi

Tip Unloadinge Sahip Olan Denizaltı Pervanesi
Yani özetle denizaltıyı verimli seyretmek (denizaltının sıası ve denizaltının şnorkel yaptığı sürenin toplam seyir süresine oranı ile hesaplanan indiscretion oranını etkiliyor) ile denizaltıyı sessiz seyrettirmek bir çatışma halinde. Arada bir yerde biraz birinden biraz ötekinden ödün vererek bir optimizasyon yapmak gerekiyor. Bu durumda suüstü savaş gemilerinde genelde 5 kanatlı ve skewlü pervaneler görüyoruz, modern denizaltılarda ise 6-7 kanatlı pervaneler (veya nükleerlerde birazdan değineceğim pumpjeti) görüyoruz. Sualtı hız rekortmeni Alfalar ve Papa sınıfı Rus Denizaltılar artık 40 knt üzerinde gittiğinden fark edilme korkusu taşımadığı için akustik kaygıdansa yüksek sürat isterinden ötürü 5 kanat olarak seçilmiş olacak. Bu denizaltıların zaten düşük süratte denizaltıyı sevk edebilmek için kıç ufki dümen üzerine konumlandırılmış yedek sevk sistemleri olduğunu biliyoruz.

41 knot Sürate Erişen Lira (Alfa) Sınıfı Rus Denizaltısının 5 Kanatlı Pervanesi

Alfa Sınıfı Denizaltının Yardımcı İticisi
Genel bir hatamız denizaltının pervane sayısının denizaltının tonajı ile alakalı olduğunun sanılması. Özellikle bizim Ay sınıfı denizaltıların 1200 tonluk deplasmanları ile beş kanata sahipken daha büyük deplasmana sahip Preveze ve Gür Sınıflarına geçildiği zaman artan kanat sayısının bu artan kütleyi itebilmek için olduğunu sanmak gibi bir yanılgımız bulunuyor. Bu aslında tamamen Almanların hidroakustik bilgilerinin veya pervane imalat teknolojilerinin Ay sınıfı denizaltılar yapıldığı zaman yeterince ilerlememiş olmasından kaynaklanıyor. Soğuk savaş yıllarında gerek Rusya tarafından ve gerekse ABD tarafından yapılan çalışmalarla kanat sayısının akustiğe etkisi anlaşılabilmiş ve bunun sonrasında yapılan denizaltılarda ekseriyetle yedi kanatlı ve yüksek çalıklığa sahip pervaneler tercih edilmiştir. Almanların uzun yıllar kendi bahriyelerinde kullandıkları 206 denizaltıları Ay sınıfının neredeyse üçte biri deplasmana sahip olduğu halde yedi kanatlıdır örneğin.

Pervane İzi (Solda: Konteyner Gemisi, Ortada: X tipi dümene sahip bir denizaltı, Sağda: İki pervaneli savaş gemisi)
Pervane kanat sayısının tek veya çift olmasına da değinirsek;
Bu konu da aslında harmoniklerle doğrudan ilintili. Pervane kanadı geminin izine girdiği zaman düşük akışa sahip bir su akışı içinde çalışırken bu izden kurtulduğunda yüksek akışa sahip bir akış içinde çalışıyor. Bu da kanat üzerinde yükleme ve boşaltmalara neden oluyor dedik. Denizaltının izini düşündüğümüzde ister + isterse x formunda dümenlere sahip olsun, mutlaka dört tane düşük akışlı izi görüyor olacağız ve üst kısımda da yelkenden ötürü yine bir düşük akış bölgesini bekliyor olacağız. Bu halde pervane kanatları sırayla yine bu yelken arkasında kalan ize girdiğinde bir BRF tonalı üretecektir. Ancak örneğin dört kanatlı bir pervane kullanıyor olursak tüm kanatlar aynı anda dört dümenin izinde aşırı yükleniyor ve bu dümen izinden kurtulduğu anda da yüksek hız rejimine girip az yükleniyor olacaklar. Bu da ciddi bir titreşime neden olacağı için tonalı yükseltecektir. Sekiz kanatlı bir pervanede yine dört kanadın ize girmesi ve kalan dört kanadın iz dışında kalması yüzünden yüksek titreşim beklenebilir.

ABD Donanması Advanced Swimmer Delivery System (ASDS) 6 Kanatlı Pervanesi
6 kanatlı pervane ise bir istisna. Bu sayıda kanadın tercih edildiği üstelik Type 212A ve Advanced Swimmer Delivery System (ADSD )gibi modern uygulamalar mevcut. Dört dümen ile tam bir iz uyuşmasına girmediği için olduğunu tahmin edilebilir. Bu halde 5 kanat sayısı modern bir denizaltı pervanesi için azken 8i de dümen izinden ötürü elemişken elde 6, 7 ve 9 kalıyor. Burada da imalat teknolojisi bizi sınırlıyor. 9 kanatlı bir skewback pervanede kanatlar artık o kadar inceliyor ve birbirlerine yaklaşıyor ki bunun dökümünü yapmak artık mümkün olmuyor. Bu yüzden BRF macerasına genelde 7 kanatta son vermek durumunda kalınıyor. Fransız Naval Group’un Démonstrateur de Drone Océanique isimli XLUUV’da yedi kanatlı bir skewback pervane üretebildiği görüldü. ASDS (60 ton) gibi DCS-L (30 ton) gibi mini denizaltılarda ise pervane imalatı (döküm/CNC işleme) zorluklarından ötürü 5/6 kanatla yetinildiğini görüyoruz. Ancak kesinlikle bunun tonajla bir ilgisi bulunmuyor. Konu imalat zorluğu ve maliyet. Yoksa ne kadar çok kanat o kadar yüksek frekans ve dolayısıyla sessiz denizaltı.

Kilo Sınıfı Alrosa Denizaltısına ait 11 Kanatlı Pumpjet Sistemi

Kilo Sınıfı Denizaltının Kıçta, Sancak ve İskelede Bulunan Yardımcı İticileri
Gelelim pumpjet konusuna. Nükleer denizaltılarda pump jet su jeti sistemi kullanılıyor. Bu sistem düşük süratlerde sabit piçli pervanelere göre çok daha verimsiz çalışıyor ancak nükleer denizaltıda verimlilik aranmıyor zaten sınırsız denebilecek bir enerji var. Burada artık amaç soğutma sistemlerinin tulumbalarının devamlı çalışıyor olması ve çok büyük cüsselerinden ötürü zaten gürültü olan bu devleri biraz olsun susturmaya çalışmak. Orada 11, 13, 15 gibi çok sayıda kanat ile, sabit piçli denizaltı pervanelerine göre çok daha küçük ve yüksek devirli olan pervaneler ile çalışılıyor ve bu sayede BRF mümkün olduğunca yüksek frekanslara öteleniyor ve gürültünün kısa mesafede sönümlenmesi ve uzaktaki pasif sonarlar tarafından duyulmaması sağlanıyor. Tulumba vb diğer sistemlerin çalışma devirleri ve dolayısıyla frekansları zaten yüksek olduğu için onlar da kısa mesafede sönümleniyor. Pumpjet sistemi, konvansiyonel dediğimiz dizel elektrik denizaltıların (SSK) seyir süratinin büyük çoğunluğunu oluşturan düşük süratlerdeki verimsizliğinden ötürü bu denizaltılarda tercih edilemiyor.

41 knot Sürate Erişen Lira (Alfa) Sınıfı Rus Denizaltısının 5 Kanatlı Pervanesi
Pumpjet sistemin konvansiyonel denizaltıdaki deneysel bilinen tek uygulamasını Rusların Alrosa isimli Kilo sınıfında gördük ( https://www.linkedin.com/feed/update/urn:li:activity:7181572460830478336?updateEntityUrn=urn%3Ali%3Afs_feedUpdate%3A%28V2%2Curn%3Ali%3Aactivity%3A7181572460830478336%29 ) ancak Alrosa’nın bu sistemi yüksek süratlerde kullandığı ve düşük süratler için kıçta yer alan iki küçük iticiyi kullanma ihtimalinin yüksek olduğunu ve Rusların henüz bu sistemi başka bir SSK’larda denemediklerini gözönünde bulundurmak gerekir.

İngiliz Denizaltılarında Kullanılan Pervane Bosscap
Type 214 Denizaltı Pervane Bosscapi

Rus Denizaltı Pervanelerinde Kullanılan + Uçlu Pervane Bosscap
Gelelim ikinci sorumuza, pervane göbek parçası için niçin denizaltılarda ilginç geometriler kullanılıyor? Pervane göbeğinde yer alan bitiş parçasına propeller boss cap (pervane bosa şapkası) deniliyor. Bunlar da bir yandan pervanenin ek bir itme yaratmasına da yardım ederken asıl amaçları ise pervane kök kavitasyonunu gidererek denizaltının pervane gürültüsünü azaltmaya katkı sağlamak. Bu amaçla eskiden İngiliz ve Alman denizaltılarında azalan konik ve sonra artan konik forma sahip pervane bosa şapkası kullanılmaktaydı. Ruslar ise halen sabit kanatlı pervanelerinde ucu + şeklini alan bir pervane bosa şapkası kullanmaktalar. Almanların ise Type 214 ile başlayarak pervane kökündeki akışı sekiz kanatlı bir tür difüzör üzerinden gönderen bir bosa şapkası kullandıkları dikkatleri çekiyor.

Örnek Çok Eksenli CNC Pervane İşleme Merkezi
Pervane üretimi, pervane erkek kalıbının (model) hassas şekilde işlenmesi, bundan dişi kalıp elde edilmesi ve hazırlanan kum kalıplara Cu2, Cu3, Cu4, NiBrAl, CiBrAl gibi bronz alaşım madenlerin dökümü ve sonrasında pervane yüzeyinin hassas şekilde işlenmesi ile yapılmaktadır. Pervane modelinin hassas bir şekilde işlenebilmesi son derece önemlidir. O kadar önemlidir ki burada yeri gelmişken Soğuk Savaşın Amerika Birleşik Devletleri, Japonya ve Norveç arasında çok büyük bir krize neden olan Toshiba–Kongsberg_Skandalı‘na değinmeden geçmek olmaz;
1983 Yılında İnşasına Başlanan Akula Sınıfı (Project 971 Shchuka-B – Щука-Б) Denizaltıya ait Sanat Eseri Pervane
Toshiba–Kongsberg Skandalı;
1986 yılının sonunda Pentagon’a gelen bir ihbar ile Japon makina ve elektronik devi Toshiba firmasının Sovyetler Birliğine, ithalatı Coordinating Committee for Multilateral Export Controls (CoCom) ile yasaklanan, çok hassas pervane imalatında kullanılabilecek 8 adet 5-axis CNC tezgahın mekanik aksamlarını sattığı anlaşılır. Yapılan soruşturma sonrasında 1982-1983 yılları arasında bu son derece teknolojik tezgahın hazırlanan sahte bir belge ile bir dikey torna makinası olarak gösterilerek ithalat lisansının alındığı ve Norveçli Kongsberg firmasının ürettiği nimerik CNC kontrol elektronik ve yazılı ile de birleştirilerek Sovyetler’de denizaltı pervane üretimi yapmak için kullanıldığı öğrenilir. Pentagon, Rus denizaltılarının tespitinin zorlaştığını doğrular. Konge Üyesi Hunter; “Amerikan nükleer denizaltılarının Sovyet denizaltılarını tespit menzilinin %50 azaldığını açıklar ve bunun Amerikan Denizcilerinin hayatlarını riske attığı ve bu riski bertaraf edebilmek için ABD’nin 10 yıl içince 30 nükleer denizaltıyı toplamda $30 milyar dolar harcayarak inşa etmek durumunda kalacağını” ortaya koyar. Toshiba ürünlerinin Japonya’ya satışı yasaklanır. Beyaz Saray önünde Toshiba walkman ve televizyonlarını kırarak kongre üyeleri protestolar gerçekleştirirler. Japon Ticaret ve Sanayi Bakanı Tamura, Japonya Başbakanı Yasuhiro Nakasone tarafından ABD’ye gönderilir ve Birleşik Devletler Savunma Genel Sekreteri Casper Weinberger’den şahsen özür diler. Japonya da ülkeyi düşürdüğü bu durumdan ötürü Toshiba’ya ciddi cezalar uygular, birçok istifa yaşanır, bazı çalışanların KGB ajanı olduğu değerlendirilir, sahte belgelerin hazırlanmasından sorumlu olduğu anlaşılan en üst seviye iki Toshiba idari görevlisi 10 ay ve 1 yıl olmak üzere hapis cezasına çarptırılırlar.

Alman Kompozit Pervane Kanatlarının Bronz Gövdeye Birleşimi
Pervanelerle ilgili sessizleştirme çalışmalarını anlatmaya geri dönersek; son zamanlarda yaygınlaşan ve pervanenin gürültüsüne olumlu etki yaptığı iletilen bir husus da pervane kanatlarının kompozit olarak üretilmesidir. Burada kanatlar kompozit malzemeden üretilmekte, kök kısımları talaşlı imalat ile işlenmekte ve bronz pervane göbeğine açılan slotlara yerleştirilerek sabitlenmektedir.
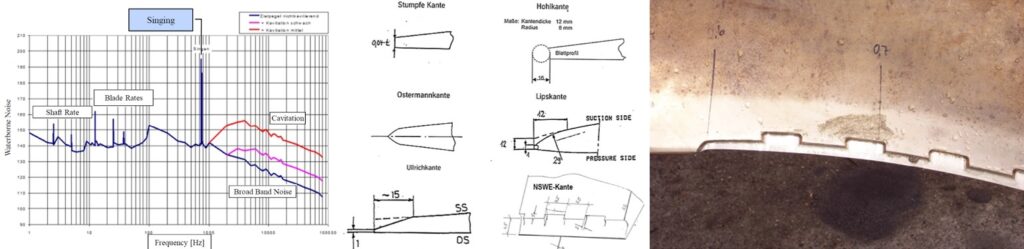
Pervane İzler Kenarı Singing Önleme Geometrileri
Denizaltı pervaneleri ile ilgili bir yazı yazıp, hidro akustiğe değinmemek olmaz. Hidroakustiğe girdikten sonra da singing propeller konusuna girmemek de olmazdı. Pervane kanadı ucunda oluşan girdapların pervanenin doğal frekansı ile çakışması durumunda meydana gelen rezonanstan ortaya çıkan singing fenomeni bu frekansta çok yüksek bir gürültü seviyesinin oluşması ile sonuçlanmaktadır. Bir denizaltı pervanesi için kesinlikle kabul edilebilir olmadığından giderilmesi gerekmektedir. Bunu giderebilmek için pervanenin izler kenarına buradaki girdabın hareketini değiştirecek şekilde bir talaşlı işleme yapılması ile anti-singing özelliği kazandırılmakta ve bu sorun giderilebilmektedir.
Jenerik Denizaltı Modeli Suboff ve E1619 Jenerik Denizaltı Pervanesi
Jenerik Denizaltı Modeli Suboff ve E1619 Jenerik Denizaltı Pervanesi
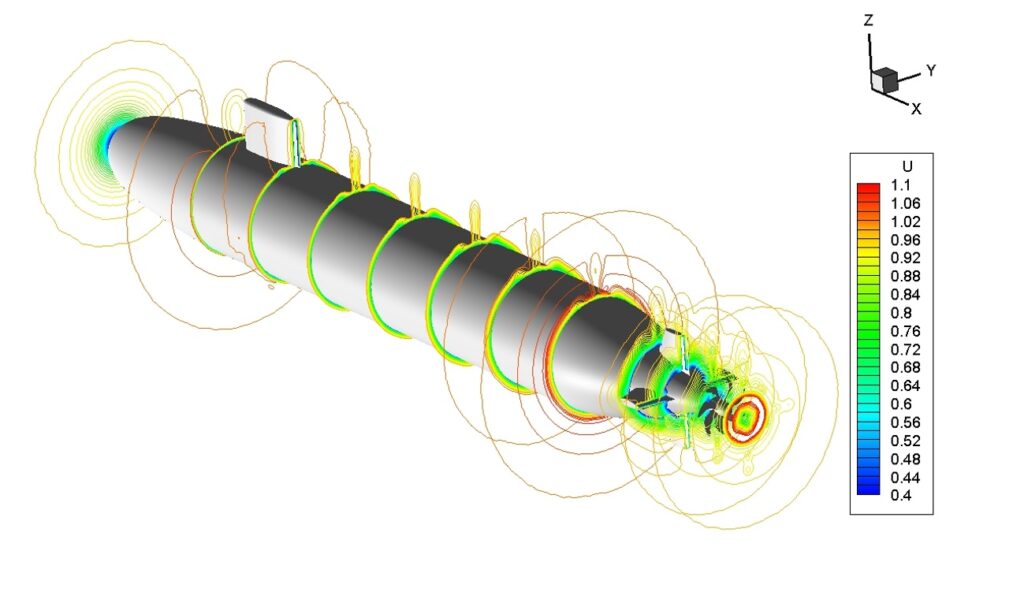
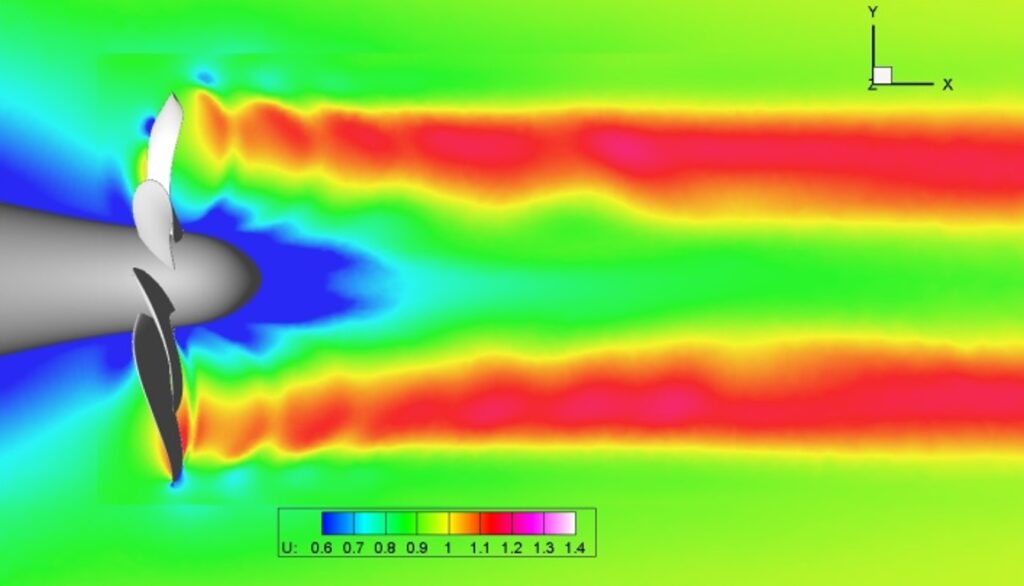
Denizaltı pervanesi tasarımı ile ilgili çalışmalar öncelikle bilgisayar ortamında yapılır. Uygun pervane çapı ve geometrisi belirlendikten sonra kanatlar üzerine gelen hızlar belirlenir. Bu kanatlar üzerindeki akışa uygun kanat foil kesitleri belirlenir. Gürültü ile ilgili hesaplamalar öncelikle nümerik simülasyonlar şeklinde bilgisayar ortamında yapılır. Ffowcs Williams-Hawkings Akustik Analojisi günümüzde en çok kullanılan nümerik pervane gürültüsü tahmin metodolojisidir. Bu konuda yapılan açık literatürde yer alan çalışmalarda genellikle E1619 jenerik denizaltı pervanesi kullanılır. Bu pervanenin tasarımı İtalyan INSEAN Enstitüsü araştırmacılarından Dr Mario Felli’ye aittir. DARPA Suboff jenerik denizaltısının E1619 denizaltı pervanesi ile sevki esnasındaki gürültüsünün tahmini ile ilgili ilk uluslararası hakemli dergi yayınlarından birini Dr Yasemin Arıkan Özden’in de yardımlarıyla gerçekleştirmiştik.

Soldan sağa; Dr M. Cansın Özden, Dr Mario Felli, Dr Yasemin Arıkan Özden

Datum AŞ Ekibinin Türkiye’de üretilen E1619 Pervane Modeli ile Gerçekleştirdikleri Self-Propulsion Deneyinden Görsel
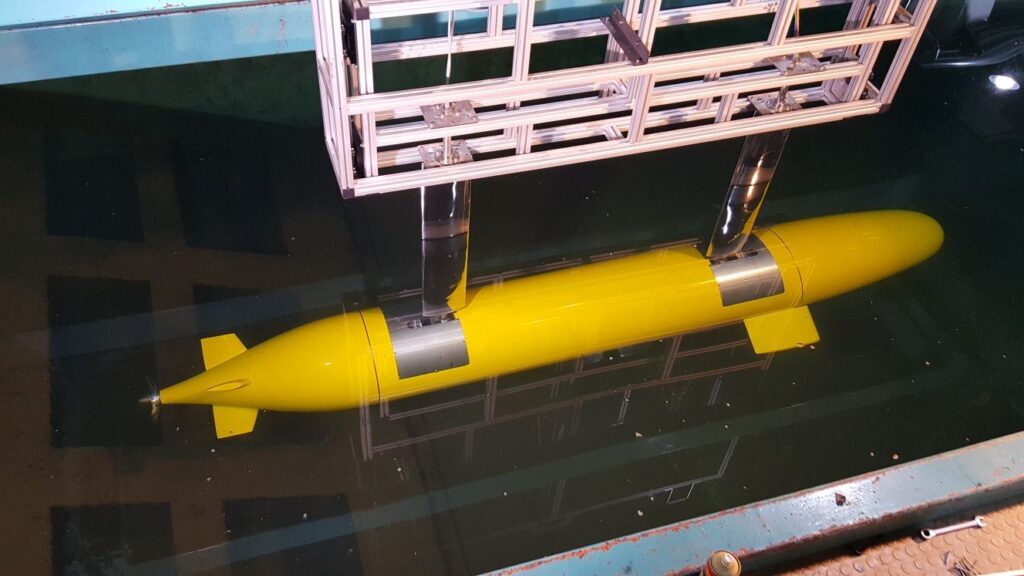
Datum AŞ Ekibinin Türkiye’de üretilen E1619 Pervane Modeli ile Gerçekleştirdikleri Self-Propulsion Deneyinden Görsel
Bilgisayar simülasyonları hem yalnız pervane için (open water) hem de denizaltı gövdesi ile pervanenin etkileşimini bir arada görmek için denizaltı modeli ile beraber gerçekleştirilmektedir. Bilgisayar simülasyonları nispeten daha ucuza gerçekleştirilebilen bir yöntem olduğu için bir çok alternatif pervane modeli geliştirilip analiz edilebilmektedir. Sonrasında bu modellerden en uygun bir ya da birkaç tanesi model ölçeğinde üretilmekte ve kavitasyon tünelinde test edilmektedir. Bu maksatla İTÜ Ata Nutku Gemi Model Deney Laboratuvarı’nda eski model Kempf&Remmers minyatür kavitasyon tüneli (bu minyatür tüneli kullarak gerçekleştirmiş olduğumuz deneyler ve hesaplamalı yöntemlerle hazırladığım yüksek lisans tez çalışmama bu bağlantıdan ulaşabilirsiniz: link ) kullanılmaktaydı. 18 Aralık 2021’de ise yeni ve büyük ölçekli bir altyapı ülkemize KATMANSIS Projesi ile kazandırıldı. Tasarımı Polonya CTO Firması ve üretimi Gürdesan Firması ile gerçekleştirilen bu sistem ile ülkemizde geliştirilecek pervane tasarımlarının hidrodinamik ve hidroakustik performanslarının iyileştirilmesi için önemli bir kabiliyet kazanılmış oldu.

İstanbul Teknik Üniversitesi’nde Yer Alan İTÜ-KAT Kavitasyon Tüneli
Kavitasyon tüneline bağlanan pervane modeli bu tünel içerisindeki suya akış verilerek farklı yükleme durumlarında farklı pervane devirlerinde test edilmekte ve pervanenin ürettiği itme ve bu itmeyi üretebilmek için gereken tork değerleri ölçülmektedir. Pervane etrafındaki akışın ölçümü ve iyileştirmesi yapılabilmektedir. Tünel duvarlarına yerleştirilen hidrofonlar sayesinde pervanenin ürettiği gürültü ölçülebilmektedir.
Kavitasyon tünelinden bir sonraki aşama ise denizaltıların kendinden hareketli ölçekli insanlı/insansız modelleri ile yapılan testlerini gerektirmektedir. Rusya’nın Typhoon sınıfı ve Borei sınıfı denizaltıyı inşa etmeden önce yaptığı ölçekli denizaltı çalışması bilinmektedir.

Typhoon Sınıfı ve Seawolf Sınıfı Denizaltılar Çok Büyük Ölçekli Modelleri İle

Borei Sınıfı Denizaltının Büyük Ölçekli Modeli
Amerika Birleşik Devletleri’nin Virginia sınıfı denizaltılarının hidrodinamik özelliklerini araştırmak için kullandığı mini denizaltı Cutthroat (LSV-2) bilinmektedir. Amerika Birleşik Devletleri’nde geliştirilmekte olan yeni denizaltı formlarının hidrodinamik özellikleri, acil durum çıkış manevraları, bunların pervane sistemlerine ait akustik özellikler vb araştırmaların o denizaltının ölçekli modelleri ile Lake Pend Oreille’de bulunan Acoustic Research Detachment – Bayview, Idaho’da yapıldığı bilinmektedir. Bu gölün zeminine yerleştirilmiş hidrofon ağları ile hassas akustik ölçümlerin yapıldığı ve en son denizaltı formlarının ve bunları sevk etmek için gereken sevk sistemlerinin hidrodinamik ve hidroakustik deneylerinin çok büyük ölçekli denizaltı modelleri ile gerçekleştirildiği bilinmektedir.

Cutthroat (LSV-2)
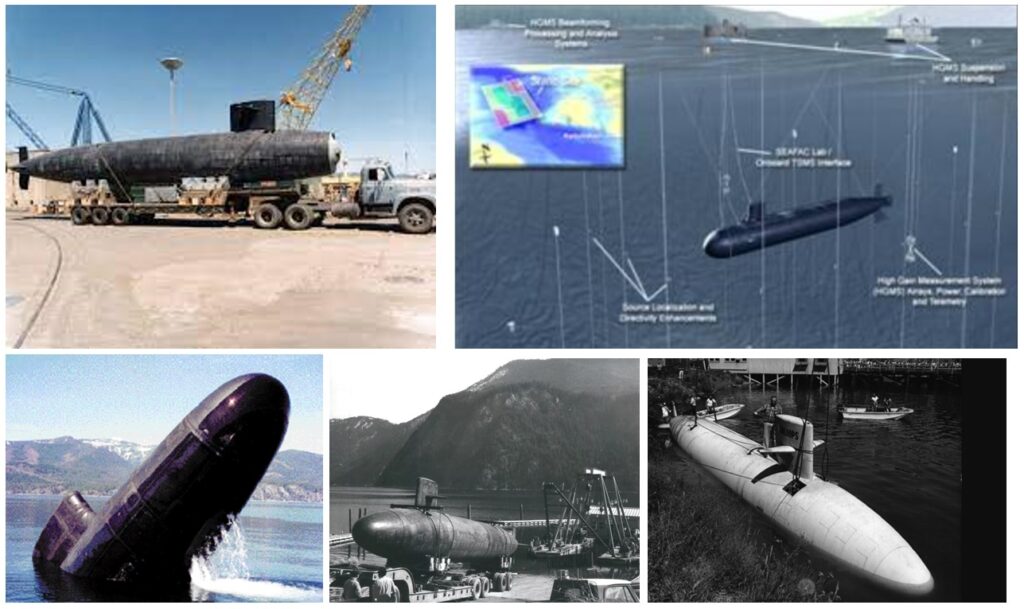
Borei Sınıfı Acoustic Research Detachment – Bayview, Idaho Büyük Ölçekli Modeli
Güncel olmasa da denizaltı hidrodinamiğine deyinmişken atlanmaması gereken iki denizaltı da ABD ve Sovyetler tarafından Soğuk Savaş yıllarında en son teknolojilerini test etmek amacıyla birer platform olarak kullandıkları Albacore ve Beluga Denizaltılarıdır. Bilinen ilk tam anlamıyla dairesel kesitli denizaltı ikinci dünya savaşında almanlar tarafından geliştirilen Dolphin midget denizaltısı ikne, USS Albacore, ilk büyük deplasmanlı sudamlası formuna sahip denizaltıdır. X dümen formu da ilk defa bu denizaltıda uygulanmıştır. ABD bu denizaltıda tandem pervane, contra rotating pervane ve birçok başka kıç formları denemiştir. Denizaltının tüm dümenlerini tek bir operatör tarafından kumanda edilmesini sağlayan kontrol sistemi ve yazılım çalışmaları da yine bu denizaltıda ilk defa denenmiştir. Diğer yandan Sovyetler de daha süratli, daha sessiz ve daha iyi manevra yapabilen denizaltılar geliştirmek için Makrel denizaltısını inşa etmiştir. Bu denizaltıda yapılan bir çok deneysel çalışmadan en ilginci kuşkusuz polimer ejection tekniği ile denizaltının direncini azaltarak çok yüksek süratlere erişme deneyleridir. Her iki denizaltının da ortak özelliği üzerlerinde silah sistemi bulundurmamalarıdır.

ABD’nin Albacore Deneysel Denizaltısı

SSCB’nin Makrel (Beluga) Denizaltısı

Planar Motion Mechanism’in Mucidi Morton Gertler Albacore Modeli İle
Denizaltı pervaneleri ile ilgili denizaltının tasarım aşamasındayken yapılan yukarıdaki çalışmalar olduğu gibi, inşası biten denizaltıların akustik ölçümlerini yapabilmek için de akustik ölçüm sistemleri yer almaktadır. Belli bir bölgeye kurulan sabit veya geçicici ölçüm istasyonları ile Target Radiated Noise – Low frequency analysis
and recording – TRN LOFAR ölçümleri yapılmaktadır. Bu ölçümler hem sonar operatörleri tarafından kullanılan gemi akustik veritabanında sonarda ilgili gemiyi tanıyabilmek için kaydedilirken hem de gürültü seviyesi ölçülerek bir sorun varsa onun belirlenebilmesi ve düzeltilebilmesi amacıyla yararlanılmaktadır.

Gemi Gürültülerine Ait Demongram (Fırat,U., Akgül, T.)
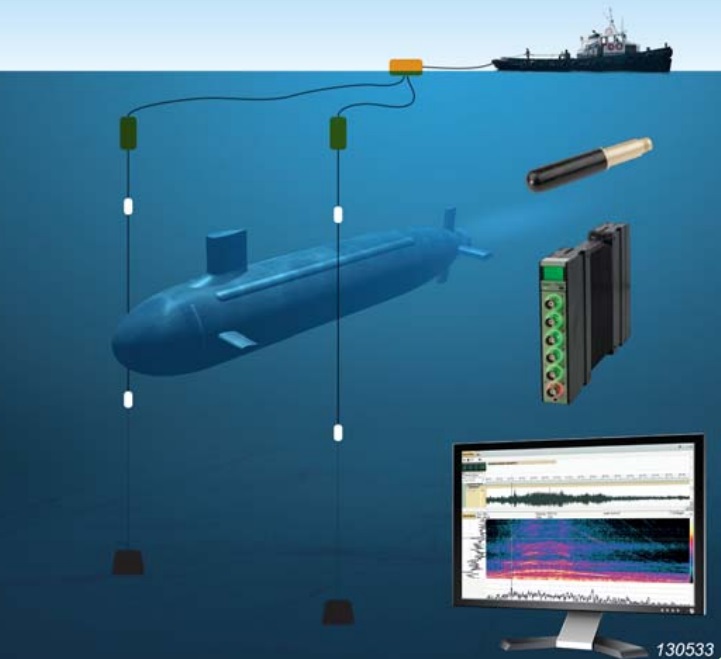
Target Radiated Noise – Low frequency analysis and recording – TRN LOFAR

TRN LOFAR – Sabit İstasyonu
Sonuç ve Türkiye Denizaltı Endüstrisi İçin Öneriler
Aşağıdaki youtube videolarında İngiltere’nin, Hollanda’nın ve Fransa’nın kendinden hareketli denizaltı modeli ile yaptığı deneyleri görmek mümkün. Ülkeler geliştirdikleri denizaltı formlarının hidrodinamik özelliklerini, manevra kabiliyetlerini ve hidro-akustik özelliklerini inceleyebilmek; en uygun dümen, pervane ve hidrodinamik form özelliklerini oluşturabilmek için bu ölçekli modellerle testler gerçekleştirilmektedir. Türkiye’de de Datum Denizaltı Teknolojileri Uygulama ve Mühendislik AŞ, İTÜ’nün Ata Nutku Gemi Model Deney Laboratuvarı’nda denizaltı deneyleri yapabilmek için iki adet sistem tasarlamıştır. Bu ilk sistem, yukarıda görsellerde DARPA Suboff denizaltısı ve E1619 denizaltı pervane modeli ile görülmektedir. İkinci sistem ise daha geliştirişmiş bir deney sistemi olarak Roketsan için Akya Torpidosu’nun deneyleri için tasarlanmış bulunuyor. Bu sistem de Ata Nutku Gemi Model Deney Laboratuvarı’nda başarı ile aktif bir şekilde kullanılmaktadır. Kendinden hareketli denizaltı modelleri ile deneyler yapmak konusunda da çok önemli teknolojik eşikleri geride bırakmış bulunmaktayız. Bu konudaki çalışmaları okuyacak okurların öncelikle aşağıdaki videoları izlemesini tavsiye ederim. Bunun sonrasında aşağıda Türkiye’de Datum tarafından yürütülen çalışmalarla ilgili görseller eşliğinde öneriler sıralanacaktır.
İlgili videolar:
Denizaltıların geometrik form tasarımına bağlı manevra kabiliyeti denizaltı tasarımının en önemli çalışma alanlarından biridir. Manevra kabiliyetindeki yetersizlik; denizaltının operasyonunu çok güç kıldığı gibi istemsizce denizaltının mukavemetini aşabilecek derinliklere inilmesi veya satıha istemsizce çıkılması gibi tehlikeli sonuçlara neden olabilmektedir. Denizaltıların 6 serbestlik dereceli hareketinin simüle edilebilmesi ve dinamik stabilitesinin tahmininde kullanılan hareket denklemlerdeki terimlerin hassas bir şekilde hesaplamalı olarak bulunabilmesindeki güçlüklerden ötürü deneysel yöntemlere başvurulmaktadır. Denizaltı manevra hidrodinamiğinde kullanılan deneysel yöntemler esas olarak iki ana grupta toplanabilir, Çekme Modlu (Planar Motion Mechanism) ve Takip Modlu (Free Running Test System) Manevra Deney Sistemleri. Bu sistemlerden ilki olan Denizaltı Çekme Modlu Manevra Deney Sistemi, İstanbul Teknik Üniversitesi Ata Nutku Gemi Model Deney Laboratuvarı’nda Roketsan’ın Akya Torpido Projesi’nin ve Milden Projesi’nin manevra deneylerini icra edebilmek için Datum AŞ tarafından tasarlanarak üretilmiştir. Denizaltı tasarımı ve hidrodinamiği konusunda çalışmalar yapmakta olan ülkeler (Fransa, Almanya, İngiltere, Hollanda, Amerika, Kore) çekme ve takip modlu manevra sistemini bir arada etkin şekilde kullanmaktadır. Takip modlu manevra sistemi ile denizaltının hareketi doğrudan gerçekleştirilmekte; denizaltının hidrodinamik stabiliteye sahip olup olmadığı ve manevra performansı başka bir postprocesse ihtiyaç duymadan izlenebilmektedir. Datum AŞ, detayları ileriki kısımlarda paylaşılacak olan Denizaltı Takip Modlu Manevra Test Sistemi’ni yerli ve milli olarak gerçekleştirebilecek teknolojik yeterliliğe sahiptir. Takip modlu sistemin Milden Projesi, Çok Amaçlı Mini Denizaltı Geliştirme Projesi (inşa tamamlanmak üzere olduğu için ancak full-scale denizaltı verileri ile model scale veriler arasında scale effect korelasyon kurulması açısından faydalı olabilecektir), STM-500 ve Dearsan Denizaltı projeleri ile başlanarak ülkemizde geliştirilen ve geliştirilecek tüm denizaltı projeleri için bir ihtiyaç olduğu görülmüştür. Uygun dümen, pervane ve hidrodinamik form özelliklerini oluşturabilmek kavramının ne kadar ciddi olduğunu biraz açmak uygun olacaktır;

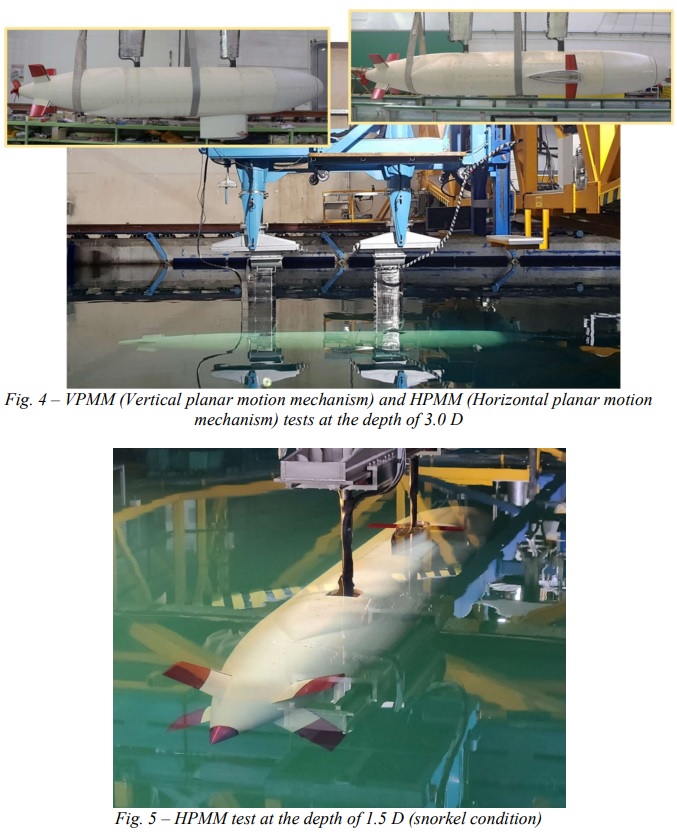
DATUM – Submarine Vertical Planar Motion Mechanism
Denizaltıların hidrodinamik formu; denizaltının ana gövdesinin şekli, denizaltının burun ve kıç geometrisi, baş ufki ve kıç dümenlerinin tipi, konumları, alanları ve şekilleri denizaltının hidrodinamik olarak dengeli bir seyir yapabilmesi için çok önemlidir. Hidrodinamik olarak aşırı stabil olan denizaltılar manevra yapmakta zorlanırlar, yatay düzlemde çok büyük çaplarda dönme manevrası icra ederek operasyonel yeterliliği ortaya koyamazlar, dikey düzlemde ise derinlik değiştirmekte güçlük çekerler. Hidrodinamik olarak dengesiz olan denizaltılar ise düz bir rota tutturamadıkları gibi derinlik değişimlerini büyük overshoot açıları ile yapar yani örneğin 50m derinliğe inmek isterken 60-70 m derinliğe iner sonra çıkmak isterken 20-30mlere çıkar ve bir türlü istenilen derinliği yakalayamaz ve bu derinlikte sabit seyiri gerçekleştiremezler. Bu durum denizaltının operasyonunu çok güç kıldığı gibi istemsizce denizaltının mukavemetini aşabilecek derinliklere inilmesi veya satıha istemsizce çıkılması (başka bir gemiyle çatışması veya savaş durumunda tespit edilme tahlikesi) gibi tehlikeli sonuçlarla karşılaşılabilir. İlk tasarlanan denizaltılarda deneme yanılma yolu ile sağlanan manevra kabiliyeti bilimin ilerlemesi ile matematiksel bir zemine oturtulmuş ve bugün kullanılan ve hala geliştirilen 6 serbestlik dereceli denizaltı manevra denklemleri oluşturulmuştur. Bu denklemlerin “hidrodinamik türev” olarak isimlendirilen terimlerinin hesaplamalı ve deneysel yöntemler kullanılarak hassas olarak saptanması ve denizaltının hareketinin doğru şekilde simüle edilmesi veya gözlemlenebilmesi bugün hala gemi inşaatı mühendisliğinin önemli bir çalışma alanını oluşturmaktadır. Denizaltıların 6 serbestlik dereceli hareketinin simüle edilebilmesi ve stabilitesinin tahmininde kullanılan hareket denklemlerindeki terimlerin hassas bir şekilde hesaplamalı olarak bulunabilmesindeki güçlüklerden ötürü deneysel yöntemlere başvurulmaktadır.

Dr Özden, SVA Potsdam Ziyareti (2019) Anısı
Almanya SVA Potsdam’daki SubPMM

Almanya SVA Potsdam’daki SubPMM

Almanya SVA Potsdam’daki Free running Test Sistemi
Denizaltı hidrodinamiğinde kullanılan deneysel yöntemler esas olarak iki ana grupta toplanabilir, Çekme Modlu (Planar Motion Mechanism) ve Takip Modlu (Free Running) Manevra Deney Sistemleri. Çekme modlu manevra deneyi ile takip modlu manevra deneyi arasındaki fark, çekme modlu deneyde denizaltı modelinin deney havuzu arabasında kurulan deney sistemine kılıca benzer iki ayakla bağlanması ile deney gerçekleştirilirken; takip modlu deneyde denizaltı modelinin herhangi bir bağlantı olmadan kendi motoru ve dümenlerini kullanarak hareket ediyor olmasıdır. Çekme modlu manevra deney sisteminde hidrodinamik türevler hesaplanmakta ve denizaltının hareketinin bilgisayar ortamında simüle edilmesi için kullanılmaktadır. Takip modlu deneyde ise doğrudan denizaltının hareketi takip modlu deney sistemi ile gerçekleştirilmekte ve denizaltının hidrodinamik stabiliteye sahip olup olmadığı ve manevra performansı izlenebilmektedir.
Almanya’da SVA Potsdam’da SubPMM adı verilen, ABD yapımı bir Planar Motion Sistemi bulunmaktadır. Denizaltı deneyleri SVA Potsdam’da yapılmakta ve hem planar motion mechanism hem de free running deney sistemlerinden faydalanılmaktadır.
Type 214 Denizaltısı’nı Almanya ile ortak ürettikten sonra kendi milli 3000 ton denizaltısını geliştiren Güney Kore’de yapılan çalışmaların Türkiye’deki denizaltı çalışmalarına en iyi örnek olduğu değerlendirilebilir. Kore de hem Planar Motion Mechanism hem de Free Running Mechanism sistemlerini kullarak hidrodinamik deneyler gerçekleştirmektedir. Bu çalışmalar Dr Kim tarafından AMT’23 Konferansı’nda “Captive Model Tests and 6-DoF Simulations of a BB2 Submarine near the Free Surface” isimli tebliğ ile ve Dr Cho tarafından “ A study on the free running model test method for BB2 Submarine” isimli tebliğ ile sunulmuştur.

Güney Kore PMM Deney Sistemi
Güney Kore PMM Deneyleri

Güney Kore Free Running Deney Sistemi
Güney Kore Free Running Deney Sistemi
Denizaltı manevra karakteristiklerinin ölçülmesinde kullanılan en hassas ve modern yöntem, denizaltının kendinden hareketli modeli ile yapılan testlerdir. Model kendinden hareketli olduğu için hiçbir kol, ayak vb. takıntı etkileşimi olmaksızın hassas ölçümler gerçekleştirilebilmektedir. Model içine gömülü bir bilgisayar ve bu bilgisayara bağlı sevk ve servo motorlarına ek olarak çeşitli sensörler yerleştirilmektedir. Verilen bir programlanmış güzergah üzerinde sevk ve dümen sistemleri aracı sevk ekmekte ve aracın tecrübe ettiği kuvvet, moment ve yörünge kayıt altında tutulmaktadır. Takip modlu manevra deneylerinde, denizaltının hareketi doğrudan gerçekleştirilmekte ve denizaltının hidrodinamik stabiliteye sahip olup olmadığı ve manevra performansı izlenebilmektedir.

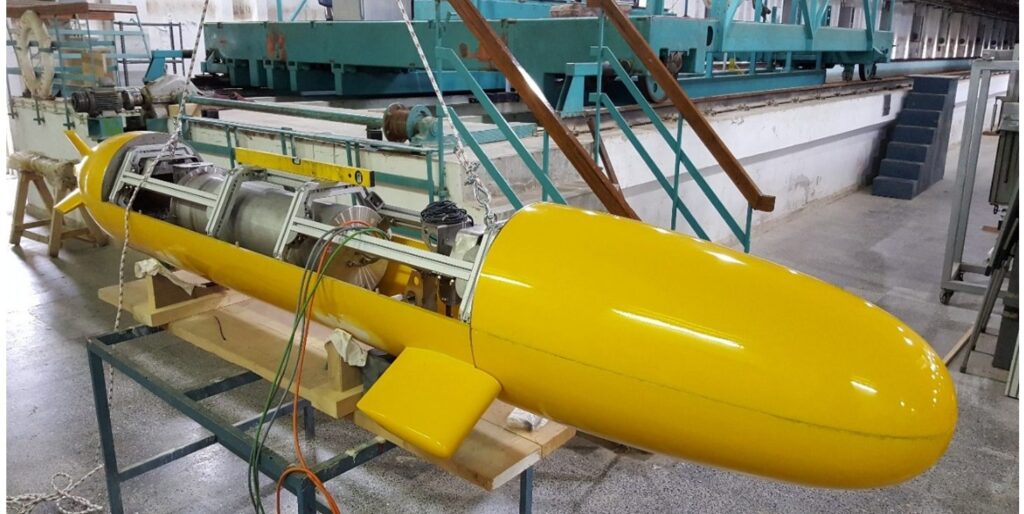
DATUM – İnsansız Denizaltı Hidrodinamik Test Denizaltısı
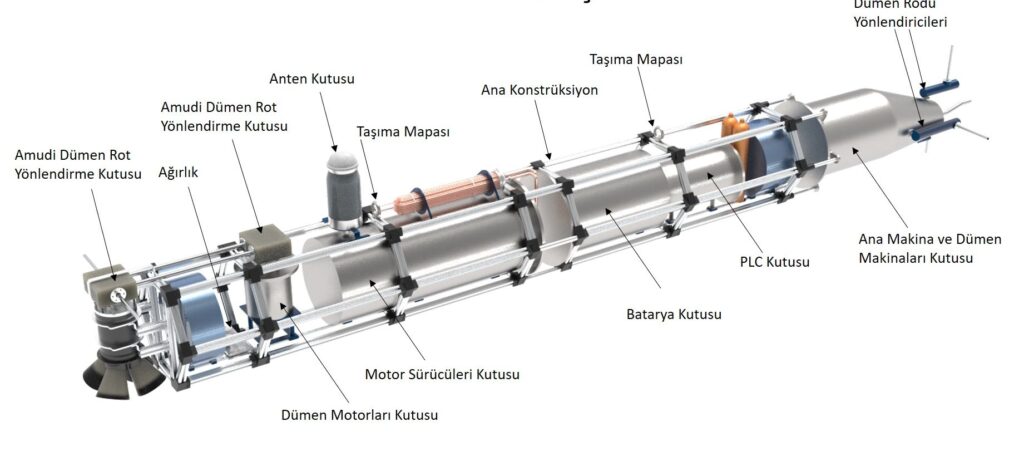
DATUM – İnsansız Denizaltı Hidrodinamik Test Denizaltısı
DATUM – İnsansız Denizaltı Hidrodinamik Test Denizaltısı
Datum Ekibi olarak kendinden hareketli denizaltı modelleri ile deneyler yapmak konusunda da çok önemli teknolojik eşikleri geride bırakmış bulunmaktayız. İntenetteki fotoğraflardan yararlanarak Type 214 ve Milden Denizaltılarının formlarını hazırlayarak işe başlamıştık. Bir Free-Running Denizaltı Modelinin içinde olması gereken sistemler aslında insansız bir denizaltının sahip olması gereken sistemlerle tam olarak aynı. Bu yüzden bu yapılan çalışmaların aynı zamanda yerli ve milli insansız denizaltı geliştirme konusunda da fevkalade ciddi aşamalar olduğunun altını çizmekte fayda var. Bu çalışmalar Datum AŞ’nin kendi sermayesi ile finanse ettiği çalışmalar olup paylaşılan bilgiler esasen Datum’un ticari gizli çalışmalarıdır. Konunun öneminin ülkemizde yeterince anlaşılamadığı kanaatinde olduğumuz için çalışmalarda kaydedilen aşamaları daha geniş çevrelere anlatabilmek, konunun muhataplarına ulaşabilmek ve gelinen seviyenin ciddiyetini ortaya koyabilmek adına bunları burada paylaşmakta artık sakınca görmemekteyiz.
Sistem temel olarak yukarıdaki videolarda İngiltere’nin, Hollanda’nın ve Fransa’nın ve yazı içinde fotoğraflarda Almanya, Amerika Birleşik Devletleri ve Rusya Federasyonu’nun kullandığı insansız modellerle aynı maksatla kullanılmak amacıyla tasarlanmıştır; “Denizaltı formlarının hidrodinamik özelliklerini, manevra kabiliyetlerini ve hidro-akustik özelliklerini inceleyebilmek; en uygun dümen, pervane ve hidrodinamik form özelliklerini oluşturabilmek”. Bu insansız denizaltı ile suüstü ve sualtında denizaltı hidrodinamik deneyleri gerçekleştirmek mümkündür. Aracın iç yapısı bir defaya mahsus üretilecek bir modüler yapıdır, bu yapı daha sonra üzerine giydirilecek farklı denizaltı formlarının deneyleri için tekrar tekrar kullanılabilecektir. Ülkemize kazandırılan bu altyapıda mükerrer deneylerde tek değişecek olan dümen servo şaftlarının çıkış noktaları olacaktır.
DATUM – Denizaltı Deney Sistemi

DATUM – Free Running Deney Sistemi

DATUM – Free Running Deney Sistemi sevk ve manevra sistemi
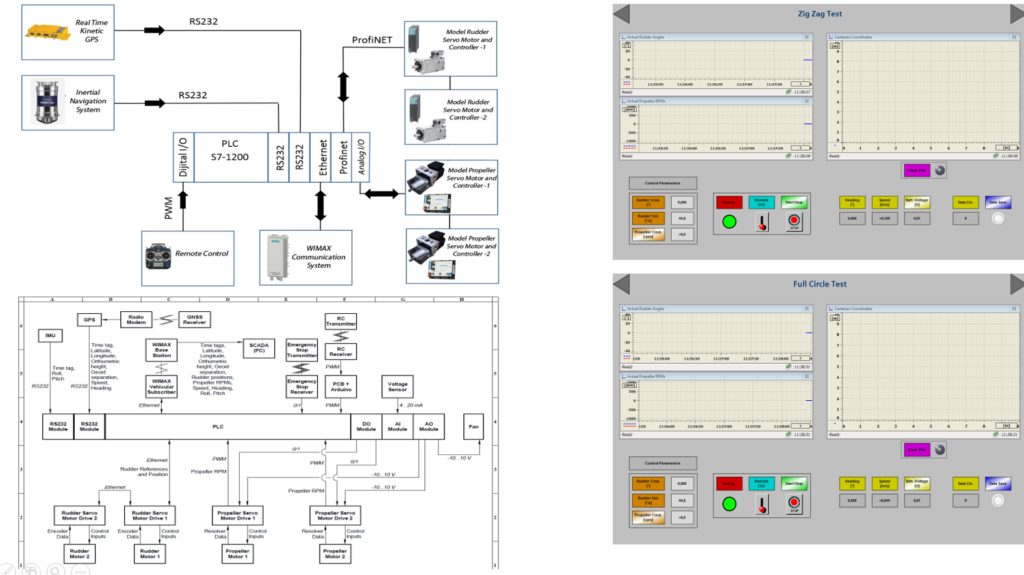
DATUM – Free Running Deney Sistemi Yazılım Arayüzü
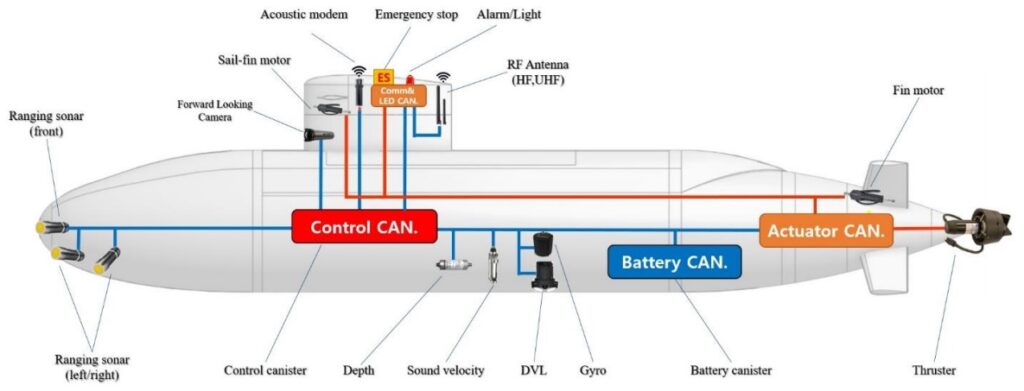
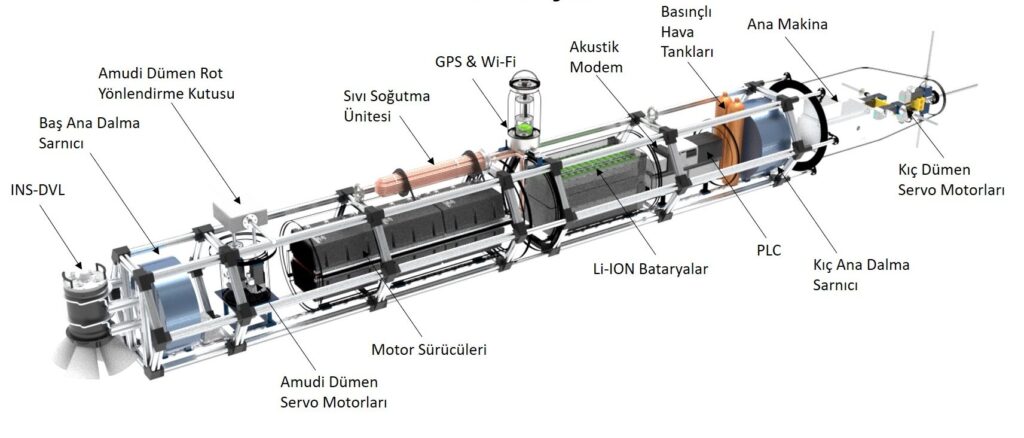
Sistem Suüstü deneylerinde Real Time Kinetic GPS teknolojisi konum ve heading bilgisi alınabilmekte, sualtı deneylerinde ise INS ve DVL’den oluşan navigasyon sisteminin ilettiği konum, sürat ve rota verileri kullanılabilmektedir. Sistem Lithium-Ion bataryalarla çalışmakta, dört sevk servo motoru ve altı dümen servo motoruna kadar muhtelif sistemleri desteklemekte. Pervane RPM ve dümen açı ölçüleri şaftlar üzerinde yer alan enkoderler ile hassas olarak ölçülebilmekte ve kaydedilmektedir. Araç motor sürücülerinin soğutulması için bir soğutma sistemine ve ana dalma sarnıçlarının tahliyesi için basınçlı hava sistemine sahiptir.
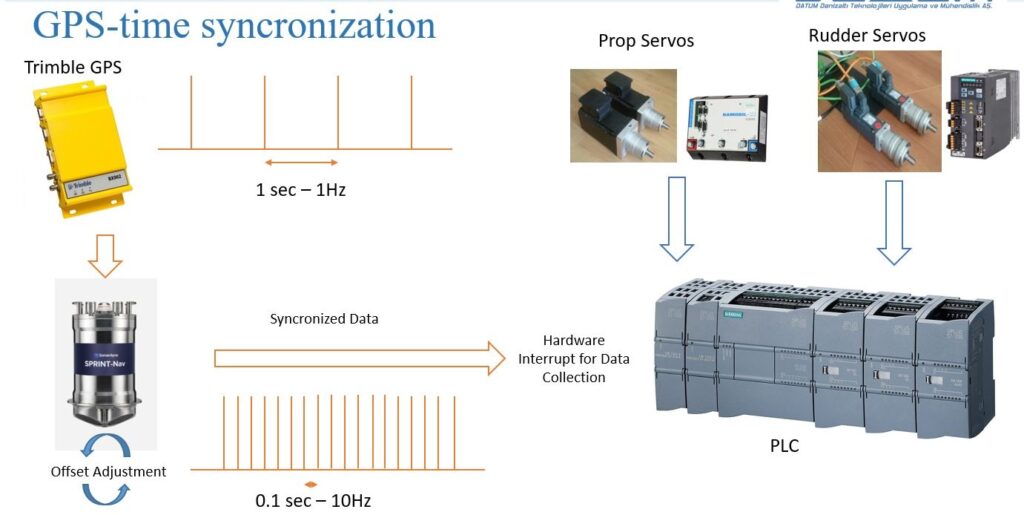
DATUM – Free Running Deney Sistemi Senkronizasyonu
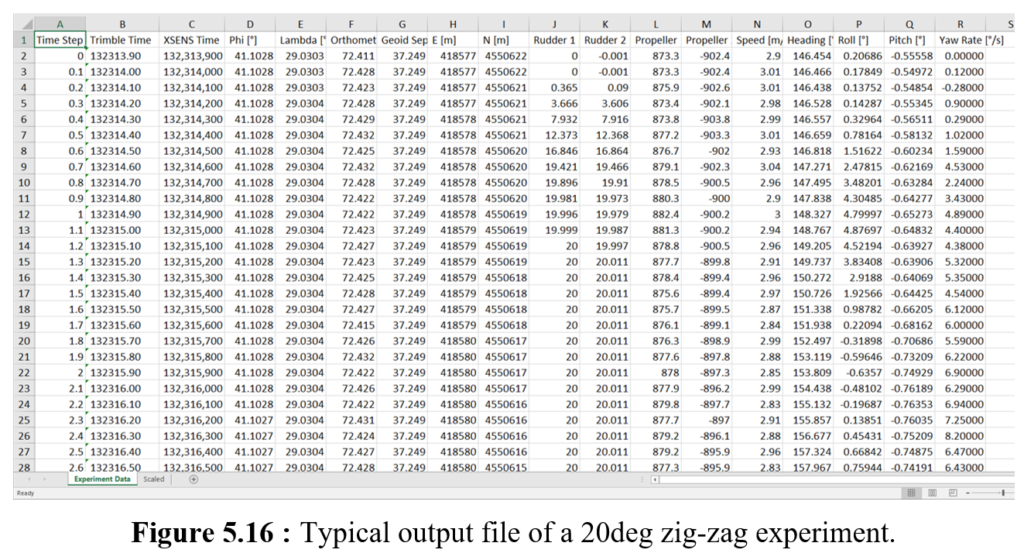
DATUM – Tipik bir Free Running Deney Verisi
Türkiye’nin denizaltı hidrodinamiği alanında izlemesi gereken yolun süratle bu insansız hidrodinamik deney denizaltısını tamamlamak olduğu değerlendirilmektedir. Bu sistem ile öncelikle halihazırda seyir tecrübeleri devam eden Type 214 denizaltısının model deneyleri yapılmalıdır. Bu deneylerden alınan model ölçekli veriler ile gerçek denizaltının aynı manevraları yaparken modern navigasyon sistemi ve gemi seyir sensörleri ile aldığı full scale gemi datası karşılaştırılmalı ve öncelikle sistemin doğrulaması (validation) yapılmalıdır. Bu aşama tamamlandıktan sonra sistemin üzerine Milden’e ait form giydirilmeli ve deneyler icra edilmelidir. Ancak bu deneylerde Milden’in yeterli dinamik stabiliteye sahip olduğu görüldükten sonra bu denizaltının detay tasarım ve inşa çalışmalarına geçilmelidir. Çünkü deneyler sonrasında dümen konumlarının ve ebatlarının değiştirilmesi gerekliliği baş gösterebilir. Type 214 ile yapılan validasyon deneyleri tamamlandıktan sonra aynı sistem yine STM500 ve Dearsan denizaltıları için de hazır hale gelecektir. Yine bu sistemin, inşası tamamlanmak üzere olan Datum Çok Amaçlı Mini Denizaltı Geliştirme Projesi için de tekrar edilmesi full-scale denizaltı verileri ile model scale veriler arasında scale effect korelasyon kurulması açısından son derece faydalı olabilecek bir çalışmadır.
DATUM – İnsansız Denizaltı Hidrodinamik Test Denizaltısı
Türk Donanması Türk Silahlı Kuvvetleri’nin bel kemiğidir. Türk Deniz Kuvvetleri’nin, üç tarafı denizlerle çevrili ülkemizin savunulması stratejisinde öncelikli platformu, ilk saldırıyı yapanı, denizaltılardır. Türk denizaltıcılarının bir harp anında güvenle ve isabetle kullanabileceği denizaltıları Türk mühendisler dışında hiç kimse geliştirmez, geliştiremez. Arjantin denizaltıcıları bunu Falkland Savaşı’nda ingilizlerin gemilerine çarparak seken torpidolarıyla pek iyi şekilde görmüştürler. Bu nedenle Türk Donanması için son teknoloji denizaltılar geliştirilmesi ülkemiz için fevkalade ciddi bir meseledir. Konunun öneminin ülkemizde yeterince anlaşılamadığı kanaatinde olduğumuz için çalışmalarda kaydedilen aşamaları daha geniş çevrelere anlatabilmek, konunun muhataplarına ulaşabilmek ve gelinen seviyenin ciddiyetini ortaya koyabilmek adına bunları burada paylaşmakta artık sakınca görmemekteyiz. Bu yazıyı bu son cümlelerine kadar okudularsa eğer, karar vericilerin konunun ciddiyetine dair bu sözlerimize itibar edeceği ve bu samimi çabaya bi-kaderi’l imkan destek vereceğine inancımız tamdır.
REFERANSLAR
- Özden, M.C. et.al. “Underwater radiated noise prediction for a submarine propeller in different flow conditions” https://www.sciencedirect.com/science/article/abs/pii/S0029801816301913
- Miasnikov, E.V. “What is known about the characeter of noise created by submarines?” – https://spp.fas.org/eprint/snf0322.htm
- https://www.techbriefs.com/component/content/article/3544-lar-17364-1
- Dietrich Wittekind Ship Acoustics Notes
- Naval Forces Magazine Subcon Special Edition
- Fırat,U., Akgül, T. “Gemi Akustik İz Analizi Ship Acoustic Signature Analysis” – https://www.emo.org.tr/ekler/ee6f5779801587f_ek.pdf?dergi=1137
- Acoustic Research Detachment – Bayview, Idaho (https://www.navsea.navy.mil/Home/Warfare-Centers/NSWC-Carderock/Who-We-Are/Bayview-Idaho/)
- Oyun İçinde Oyun: Bir İki Pervane Hikâyesi (https://uskudar.biz/seyir-defteri/acayip-mevzular/oyun-i%C3%A7inde-oyun-bir-iki-pervane-hik%C3%A2yesi.html)
- https://ussvicb.org/poems-stories/The%20Most%20Vital%20And%20Secretive%20Submarine%20Base%20Is%20In…%20Idaho.pdf
- https://www.navsource.org/archives/08/08357.htm
- https://web.archive.org/web/20150605233334/http://www.public.navy.mil/subfor/underseawarfaremagazine/Issues/Archives/issue_11/submarine_stealth.html
- https://web.archive.org/web/20150505000859/http://auvac.org/configurations/view/197
- https://pikabu.ru/story/gidrodinamicheskie_ispyitaniya_na_modeli_podvodnoy_lodki_klassa_borey_v_ladozhskom_ozere_9825176